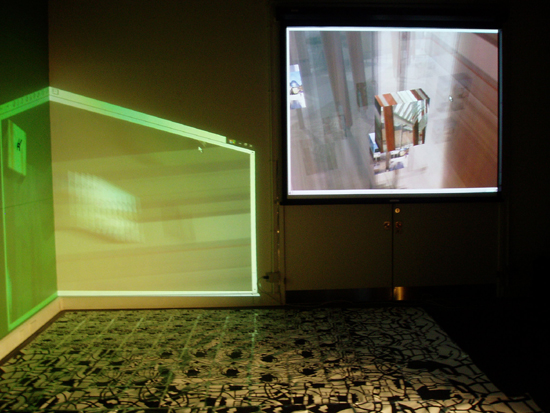
Robotica:After Darkness Before The Light by Stanza 2004. An installation using robots that navigate their own space and gather data. |
|
||||
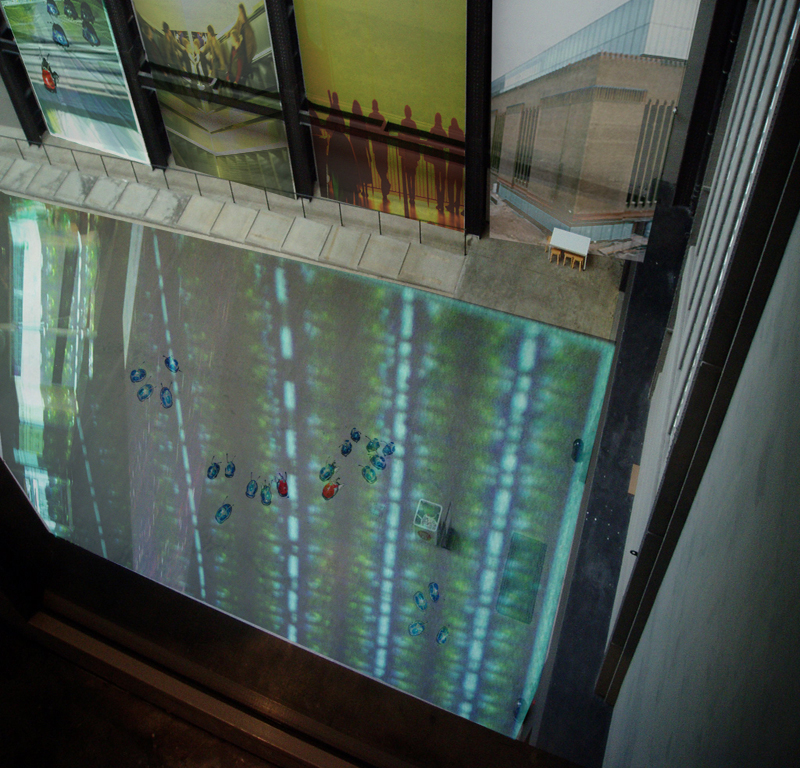
Final version will use 100 robots at the Tate Robotica by Stanza 2004.
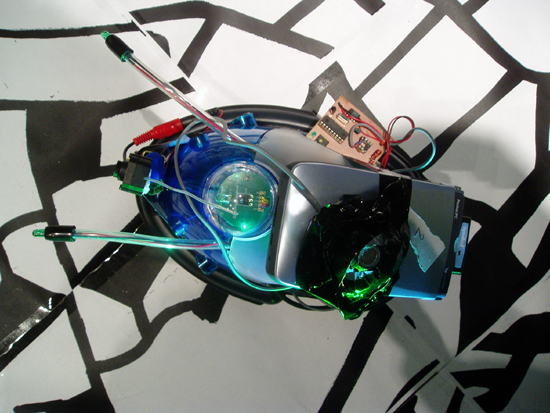
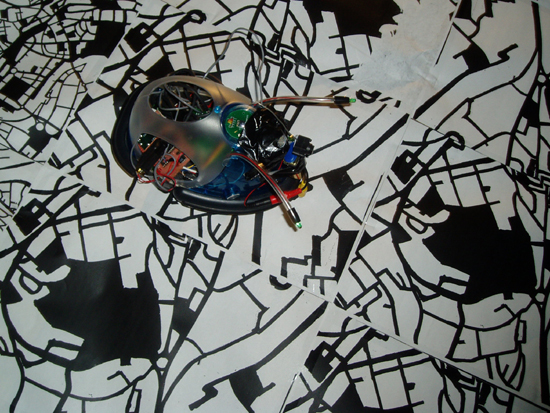
The robots can wander around with cameras on and they act like a roving CCTV network gathering information sending it to an online server. The first version involved tracking in the space, following the map, and triggering the audio visual system was implemented on June 4th 2004 at The Watershed Media Centre. The final version will use 100 robots that can be remote controlled via the web. Gathering images about the environment which are then projected into the space as a giant installation. PROTOPTYPE VERSION The robot wanders around a large black and white map on the floor. It triggers position sounds and coded 3d via ultrasound in the room and in the robot. The robot is essentially playing the sounds as it moves about and controlling the DATA.The installation acts as a simulated real space re-representing a data mesh of A GIVEN SPACE IN THIS CASE Bristol. The concept of the robot performance involves using 'cybots' TO CREATE visual systems. The robots wander about and follow maps of Bristol and trigger sound and visual data. They act as the musicians navigating and interacting with one another. The whole robot performance can be monitored on the public 'cctv' and is broadcast to the internet using a 'quicktime' server.This TV system takes the 'inside outside', broadcast in real time. I have also extended my software which acquires open streamed images from around ANY GIVEN SPACE. These images are presented into a 3d morphing model and the images are always changing and always evolving. It becomes a never ending film online for a very long time extending in real time. Keywords. Robots, electronics, ultrasound, position, urban , CCTV, networked, PDA, technology |
||||
|
||||
|
||||
|
||||
The installation space has an ultrasounds rig to control the positional data of the devices. This ultrasound system is designed and built by Cliff Randell which is in place and tested, it is configured to the room the Watershed Open wireless network. The general idea involves using a Hewlett Packard PDA running the Mobile Bristol client. If you then move around the room the position is tracked via the ultrasound system which is attached to the ceiling. This sends data to the 'elvin' servers, and using an 'elvin' extra, this information can be used to create a visual response, using Director. My intention is to extend the system using all sorts of sensing equipment. Future developments include. A. The robot will to respond to voice recognition to navigate. These spoken directions come from user uploads typed in to the map database. B. The robot at certain times will be also controllable via the web to navigate the space. So instead of operating in path following mode they can work in remote control mode. C. Multi robot event using up to one hundred robots in a huge space. Some controlled via the web, some on path following mode, some taking directions of pdas. I am looking for a large veue to adapt this robot piece to. The Watershed is collaborating in a finding venues and we have thought of Urbis and The Tate Britain. D. Take robots outside controlled via remote control via Bluetooth in mobile phones. They can wander around with their own cameras and they act like a roving CCTV network gathering information sending it to an online server. Project ideas and developments. 2004 a. Adapt motes and GPS on robots for position in space instead of the ultrasound rig. (Analysis of their position in space) Contact: stanza at sublime.net |
||||
|
||||