

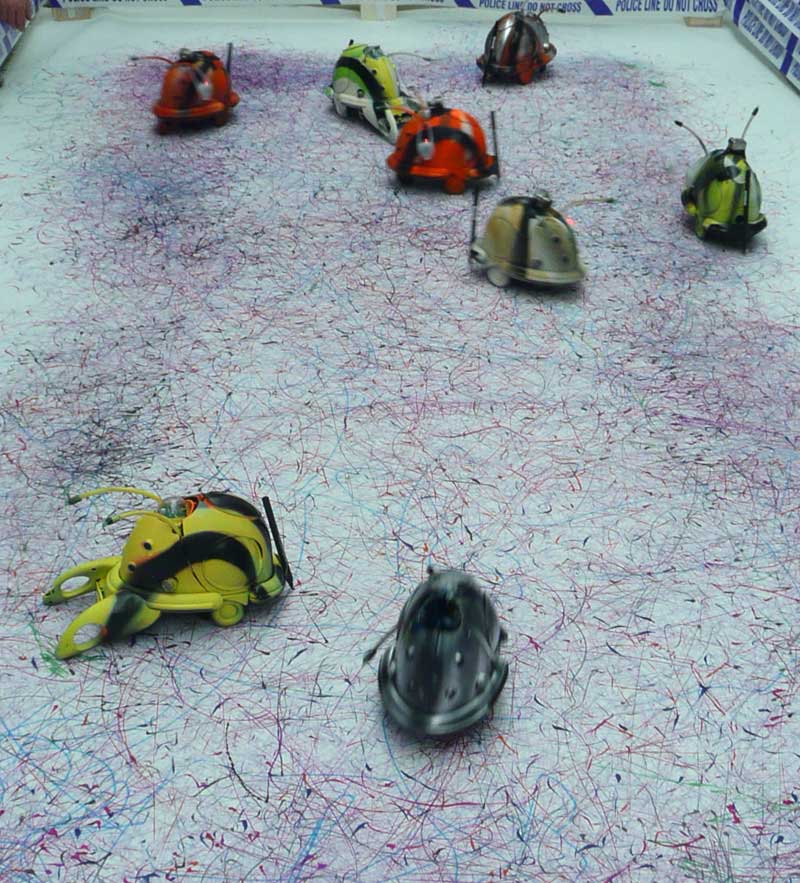
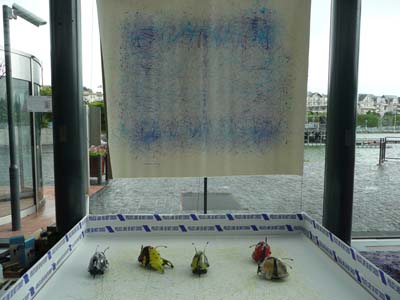
Robots wander around the "prison" and monitor each other using CCTV surveillance cameras. This robotic “wandering” is captured over each day onto the canvas. They create their own painting in their own little prison and the cameras mounted on each robots also keep a real time eye on the proceedings.
The world premier of Stanza’s “Robotica: Control inside the panopticon” was exhibited at The Victoria And Albert Museum, London in 2008. A playful robot installation - with performative and interactive aspects - that questions ideas of surveillance and tracking in popular culture using, robots, CCTV and sensor technologies. (2006- 2008). In moving through the gallery people create a ‘memory space’- a reference to a past created by the traces and paths left behind. The patterns we make, the forces we weave, reveal different ways of moving through the space. These anti social patterns disclose new ways of seeing the world. All the robots are recorded via CCTV and each is made to wear CCTV (surveillance camera) which is shown on a monitor which also records the event. Police “tape” keeps the robots inside the controlled space.
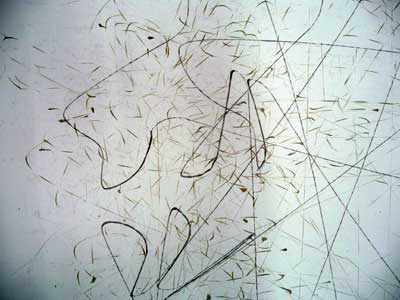
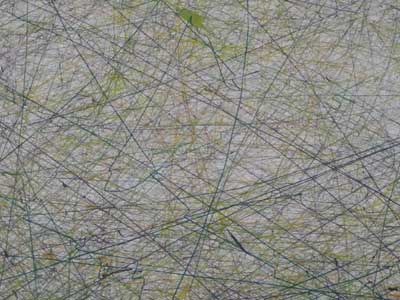
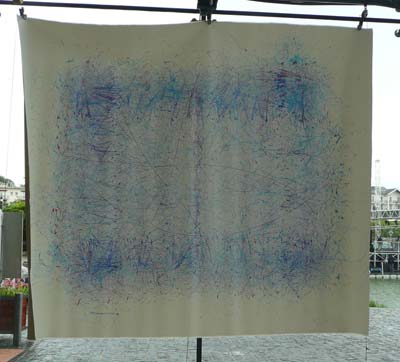
Anti social robots that draw. The idea of the Panopticon originated with the English utilitarian philosopher Jeremy Bentham as a prison design that would allow an observer to monitor all the prisoners at all times, without any prisoner being aware of whether he was being monitored or not. Like people, robots have common behaviours and can be programmed accordingly i.e. robots can follow a path (path following mode), the can avoid obstacles (avoidance mode) and they can operate in wander mode. They all try to avoid one another - depending on their proximity to one another - while searching the space. In doing so they demonstrate social behaviour. The robots mimic and trace the patterns people make - but based on algorithms. The robots are tracked - everything is watched and recorded. The digital patterns of these anti social robots are re-made as analogue patterns the robots are drawing machines. The robot path is marked with a series of 'brushes' - and a series of actions are applied to the movement of the digital brush across the rectangular canvas to create these paintings. These paintings created are robotic generative and demonstrate the anti social behaviours inside the system.
The robots wander over the canvas to make the paintings. The suggested canvas size 2.5 by 5m - and therefore a reasonable floor space is needed. All the robots will see the edges of the canvas and turn around automatically) i.e. they are roped off and will not go wandering off on their own! The set up is easy.
Summary. A group of fully programmed self built robots wander around avoiding one another while trying to escape. Surveillance cameras of installation plus wireless cameras on each robots so they could keep an eye on one another and we can watch them on the TV.
Available for touring. Please note I have conceived of the next version but this will need funds and more production set up. There is now a series of fifteen very large canvases (4 by 3 metres approx) made by the robots.
Exhibited at:-
Le Bains Numerique 4. in Paris June 2009
The Victoria And Albert Museum, London. 2008

The Victoria And Albert Museum, London 2008

Portrait Of St Paul. 100 by 80 cm C print signed Stanza. 2006
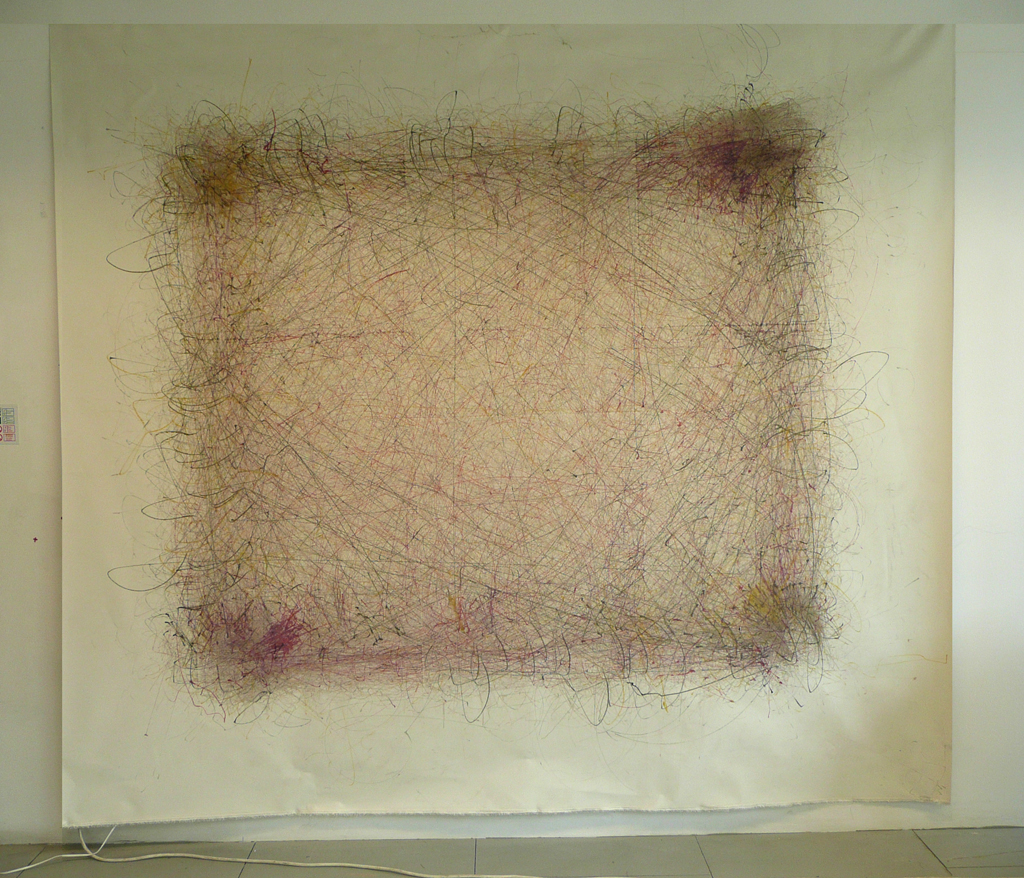 The Actions Of Control . 200 by 180 cm Paint on Canvas signed Stanza. 2006. Shown here at my studio in Goldsmiths College. The Actions Of Control . 200 by 180 cm Paint on Canvas signed Stanza. 2006. Shown here at my studio in Goldsmiths College.
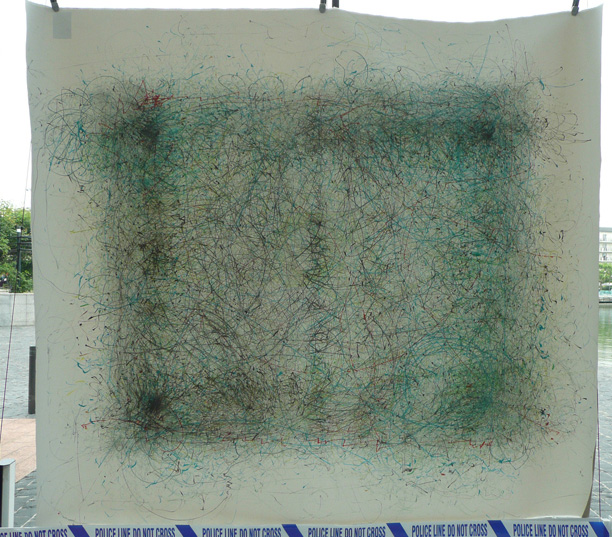
The Action of The Saints St Paul. 200 by 180 cm Robot canvas signed Stanza. 2008 . Shown here in Paris France
Previous Versions.
Robotica II: - "Robots Mating. What Robots Get Up To After Dark"
Robotica I : After Darkness Before The Light

|




















{kind=link}